
Submitted by
 apryc1
apryc1
apryc1Get trending papers in your email inbox once a day!
Get trending papers in your email inbox!
Subscribe
apryc1
 yangsui
yangsui
 Asaf-Yehudai
Asaf-Yehudai ZeqiangLai
ZeqiangLai
 quickjkee
quickjkee
 richardaecn
richardaecn
 MingleiShi
MingleiShi zhwang4ai
zhwang4ai
 akhaliq
akhaliq
 philschmid
philschmid
 Huan-WhoRegisteredMyName
Huan-WhoRegisteredMyName
 QizhiPei
QizhiPei
 zorik
zorik akhaliq
akhaliq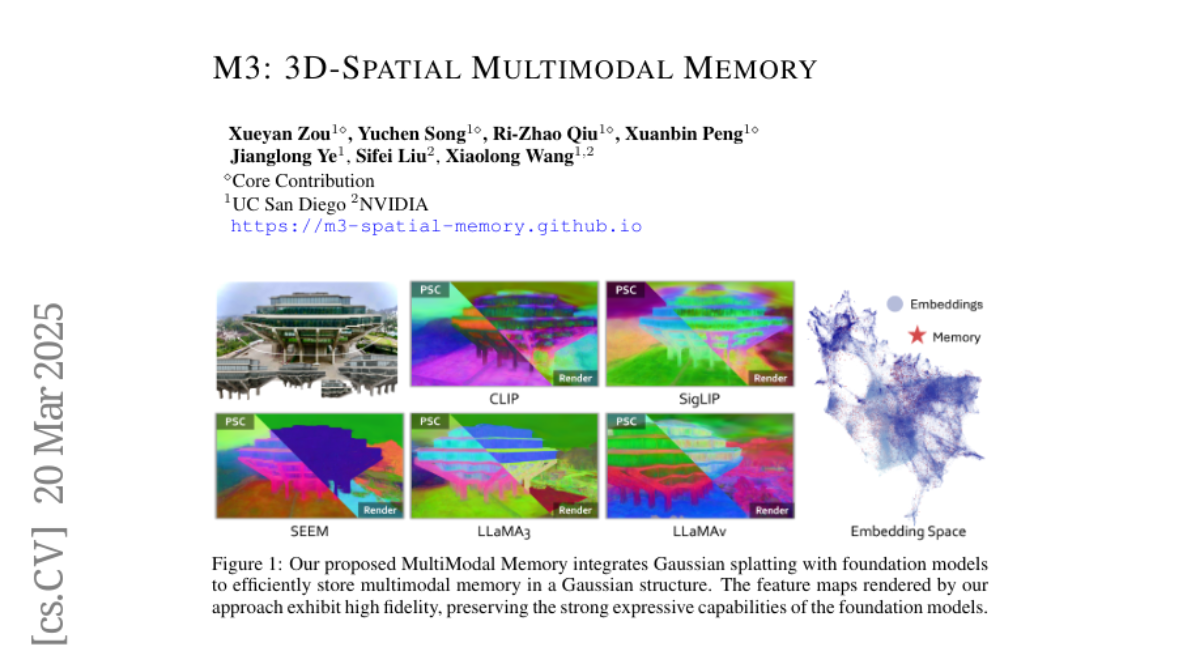
 xueyanz
xueyanz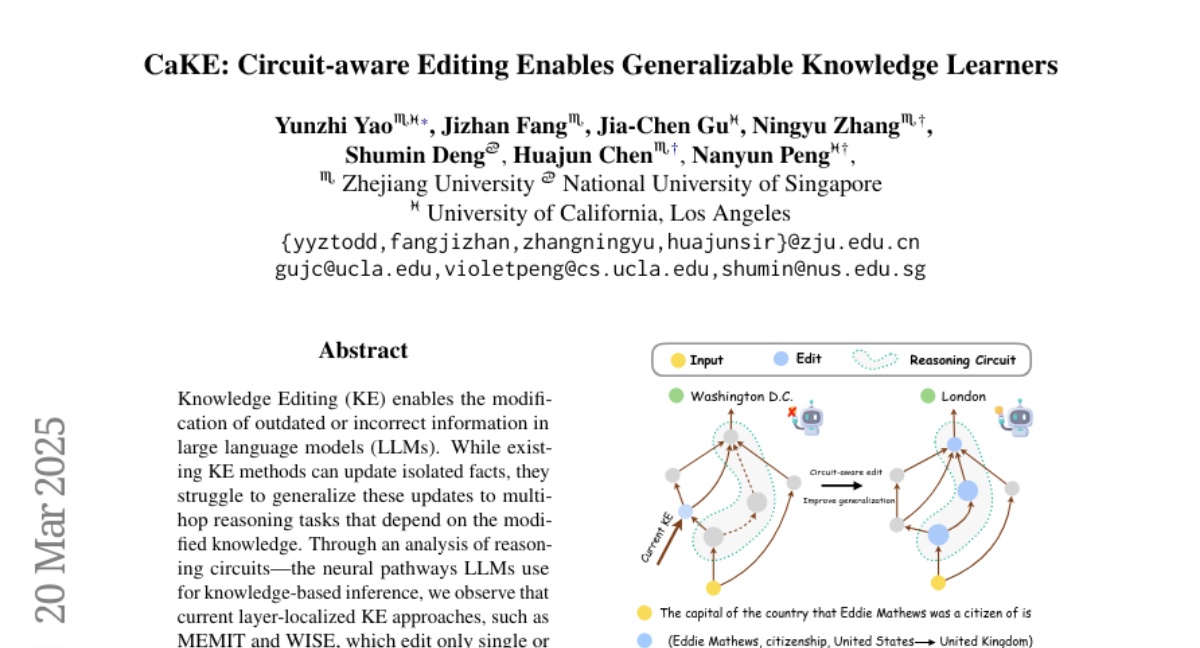
 Ningyu
Ningyu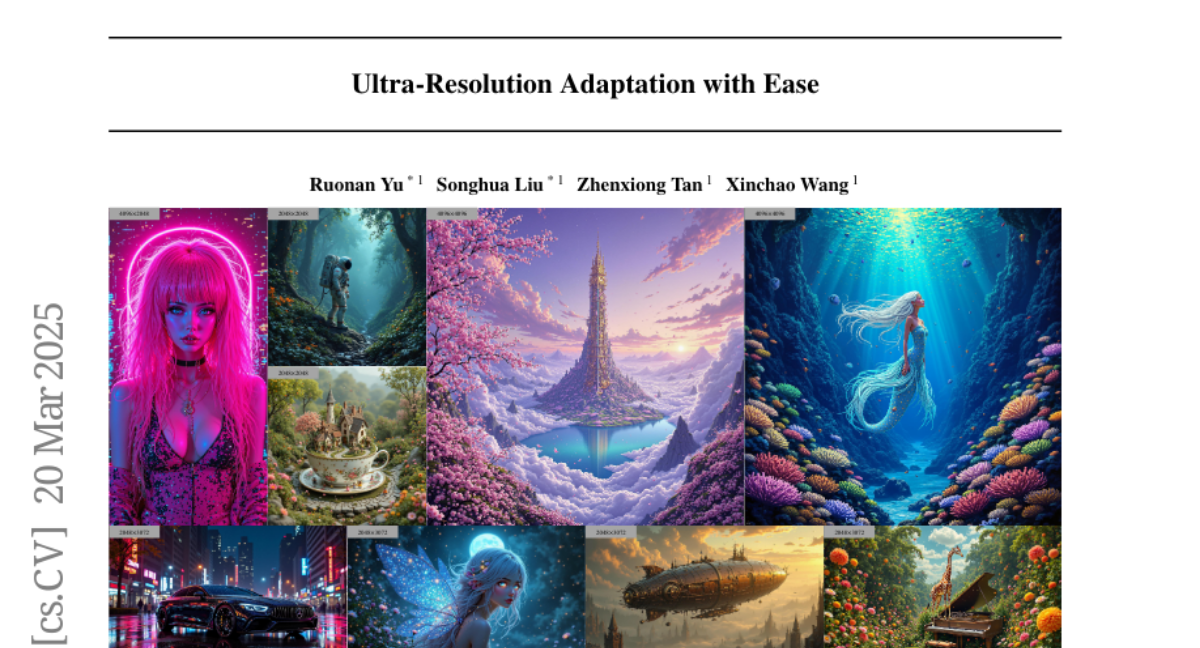
 roseannelexie
roseannelexie akhaliq
akhaliq
 mathfinder
mathfinder DyrusQZ
DyrusQZ adamdad
adamdad akhaliq
akhaliq
 cientgu
cientgu akhaliq
akhaliq
 quyanh
quyanh
 Sarim-Hash
Sarim-Hash
 pierrechambon
pierrechambon rexleeppp
rexleeppp
 lyc0930
lyc0930
 zhongwenxu
zhongwenxu
 guolinke
guolinke
 kpzhang996
kpzhang996
 zhenglin
zhenglin
 ynhe
ynhe
 Gofinge
Gofinge
 lyx97
lyx97 kpzhang996
kpzhang996
 UVSKKR
UVSKKR
 HJGO
HJGO
 lxxiao
lxxiao
 BestWishYsh
BestWishYsh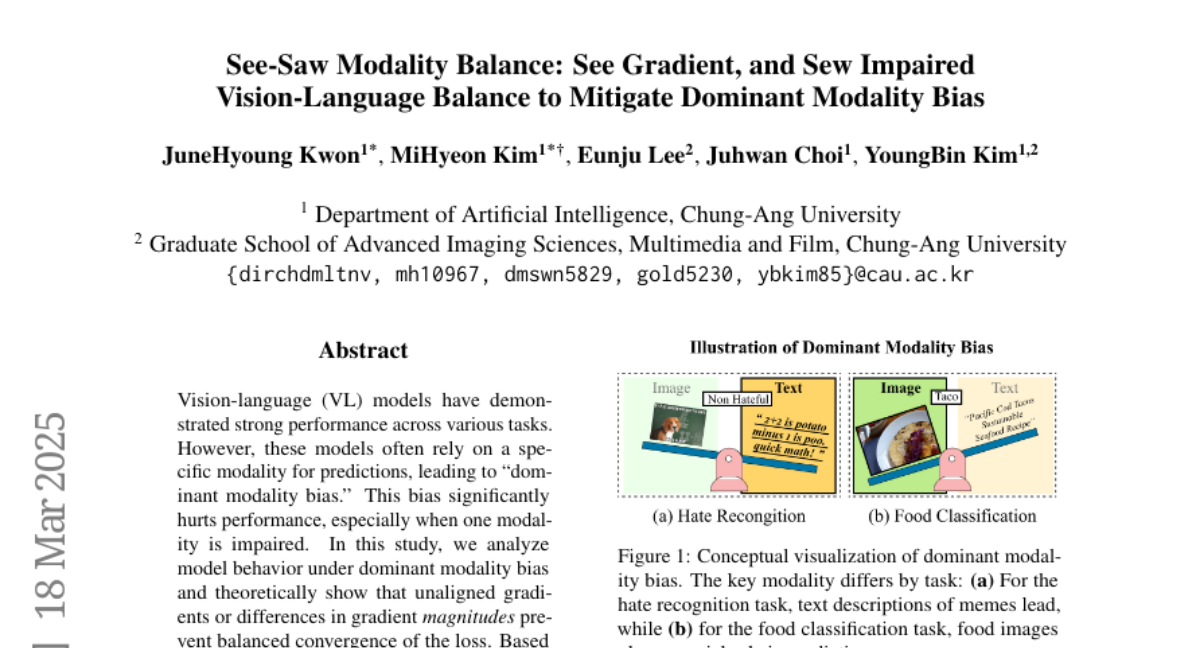
 c-juhwan
c-juhwan
 MAGAer13
MAGAer13
 ab9mamun
ab9mamun
 Devy1
Devy1
 Zilence006
Zilence006
 potamides
potamides
 wljungbergh
wljungbergh


































































